#include <TrackProjectors/TrackProjector.h>
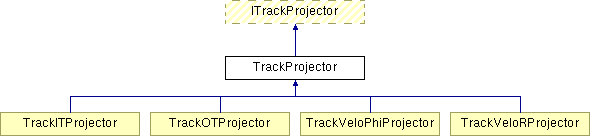
Inheritance diagram for TrackProjector:
Public Member Functions | |
| virtual StatusCode | project (const State &state, Measurement &meas) |
| virtual const HepVector & | projectionMatrix () const |
| Retrieve the projection matrix H of the (last) projection. | |
| double | chi2 () const |
| Retrieve the chi squared of the (last) projection. | |
| double | residual () const |
| Retrieve the residual of the (last) projection. | |
| double | errResidual () const |
| Retrieve the error on the residual of the (last) projection. | |
| TrackProjector (const std::string &type, const std::string &name, const IInterface *parent) | |
| Standard constructor. | |
| virtual | ~TrackProjector () |
| Destructor. | |
Protected Member Functions | |
| void | computeResidual (const State &state, const Measurement &meas) |
| void | computeErrorResidual (const State &state, const Measurement &meas) |
Protected Attributes | |
| double | m_residual |
| double | m_errResidual |
| HepVector | m_H |
Eduardo Rodrigues
Definition at line 23 of file TrackProjector.h.
|
||||||||||||||||
|
Standard constructor.
Definition at line 59 of file TrackProjector.cpp. References m_errResidual, m_H, and m_residual. 00062 : GaudiTool ( type, name , parent ) 00063 , m_H() 00064 { 00065 declareInterface<ITrackProjector>( this ); 00066 m_residual = 0.; 00067 m_errResidual = 0.; 00068 m_H = HepVector(5,0); 00069 }
|
|
|
Destructor.
Definition at line 74 of file TrackProjector.cpp. 00074 {};
|
|
|
Retrieve the chi squared of the (last) projection.
Implements ITrackProjector. Definition at line 35 of file TrackProjector.cpp. References m_errResidual, and m_residual. 00036 {
00037 return m_errResidual != 0 ? (m_residual/m_errResidual)*(m_residual/m_errResidual) : 0.;
00038 }
|
|
||||||||||||
|
Definition at line 90 of file TrackProjector.cpp. References m_errResidual, and m_H. Referenced by TrackVeloRProjector::project(), TrackVeloPhiProjector::project(), TrackOTProjector::project(), and TrackITProjector::project(). 00092 {
00093 double error = meas.errMeasure();
00094 const HepSymMatrix& C = state.covariance();
00095 double resError = error * error + C.similarity( m_H );
00096 m_errResidual = sqrt( resError );
00097 }
|
|
||||||||||||
|
Definition at line 81 of file TrackProjector.cpp. References m_H, and m_residual. 00083 {
00084 m_residual = meas.measure() - dot( m_H, state.state() );
00085 }
|
|
|
Retrieve the error on the residual of the (last) projection.
Implements ITrackProjector. Definition at line 51 of file TrackProjector.cpp. References m_errResidual. 00052 {
00053 return m_errResidual;
00054 }
|
|
||||||||||||
|
Project a state onto a measurement. It returns the chi squared of the projection Implements ITrackProjector. Reimplemented in TrackITProjector, TrackOTProjector, TrackVeloPhiProjector, and TrackVeloRProjector. |
|
|
Retrieve the projection matrix H of the (last) projection.
Implements ITrackProjector. Definition at line 27 of file TrackProjector.cpp. References m_H. 00028 {
00029 return m_H;
00030 }
|
|
|
Retrieve the residual of the (last) projection.
Implements ITrackProjector. Definition at line 43 of file TrackProjector.cpp. References m_residual. 00044 {
00045 return m_residual;
00046 }
|
|
|
Definition at line 59 of file TrackProjector.h. Referenced by chi2(), computeErrorResidual(), errResidual(), and TrackProjector(). |
|
|
Definition at line 60 of file TrackProjector.h. Referenced by computeErrorResidual(), computeResidual(), projectionMatrix(), and TrackProjector(). |
|
|
Definition at line 58 of file TrackProjector.h. Referenced by chi2(), computeResidual(), residual(), and TrackProjector(). |
 1.4.1
1.4.1