#include <ITrackProjector.h>
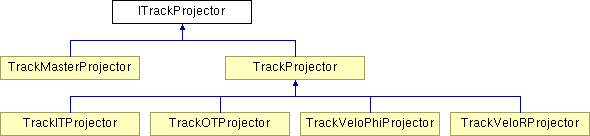
Inheritance diagram for ITrackProjector:
Public Member Functions | |
| virtual StatusCode | project (const State &state, Measurement &meas)=0 |
| virtual const HepVector & | projectionMatrix () const =0 |
| Retrieve the projection matrix H of the (last) projection. | |
| virtual double | chi2 () const =0 |
| Retrieve the chi squared of the (last) projection. | |
| virtual double | residual () const =0 |
| Retrieve the residual of the (last) projection. | |
| virtual double | errResidual () const =0 |
| Retrieve the error on the residual of the (last) projection. | |
Static Public Member Functions | |
| static const InterfaceID & | interfaceID () |
Eduardo Rodrigues
Definition at line 25 of file ITrackProjector.h.
|
|
Retrieve the chi squared of the (last) projection.
Implemented in TrackMasterProjector, and TrackProjector. Referenced by KalmanFilter::smooth(). |
|
|
Retrieve the error on the residual of the (last) projection.
Implemented in TrackMasterProjector, and TrackProjector. Referenced by KalmanFilter::filter(), and KalmanFilter::smooth(). |
|
|
Definition at line 28 of file ITrackProjector.h. References IID_ITrackProjector(). 00028 { return IID_ITrackProjector; }
|
|
||||||||||||
|
Project a state onto a measurement. It returns the chi squared of the projection Implemented in TrackITProjector, TrackMasterProjector, TrackOTProjector, TrackProjector, TrackVeloPhiProjector, and TrackVeloRProjector. Referenced by KalmanFilter::filter(), TrackMasterProjector::project(), and KalmanFilter::smooth(). |
|
|
Retrieve the projection matrix H of the (last) projection.
Implemented in TrackMasterProjector, and TrackProjector. Referenced by KalmanFilter::filter(), TrackMasterProjector::projectionMatrix(), and KalmanFilter::smooth(). |
|
|
Retrieve the residual of the (last) projection.
Implemented in TrackMasterProjector, and TrackProjector. Referenced by KalmanFilter::filter(), and KalmanFilter::smooth(). |
 1.4.1
1.4.1